/*-------------------------------------------------*/
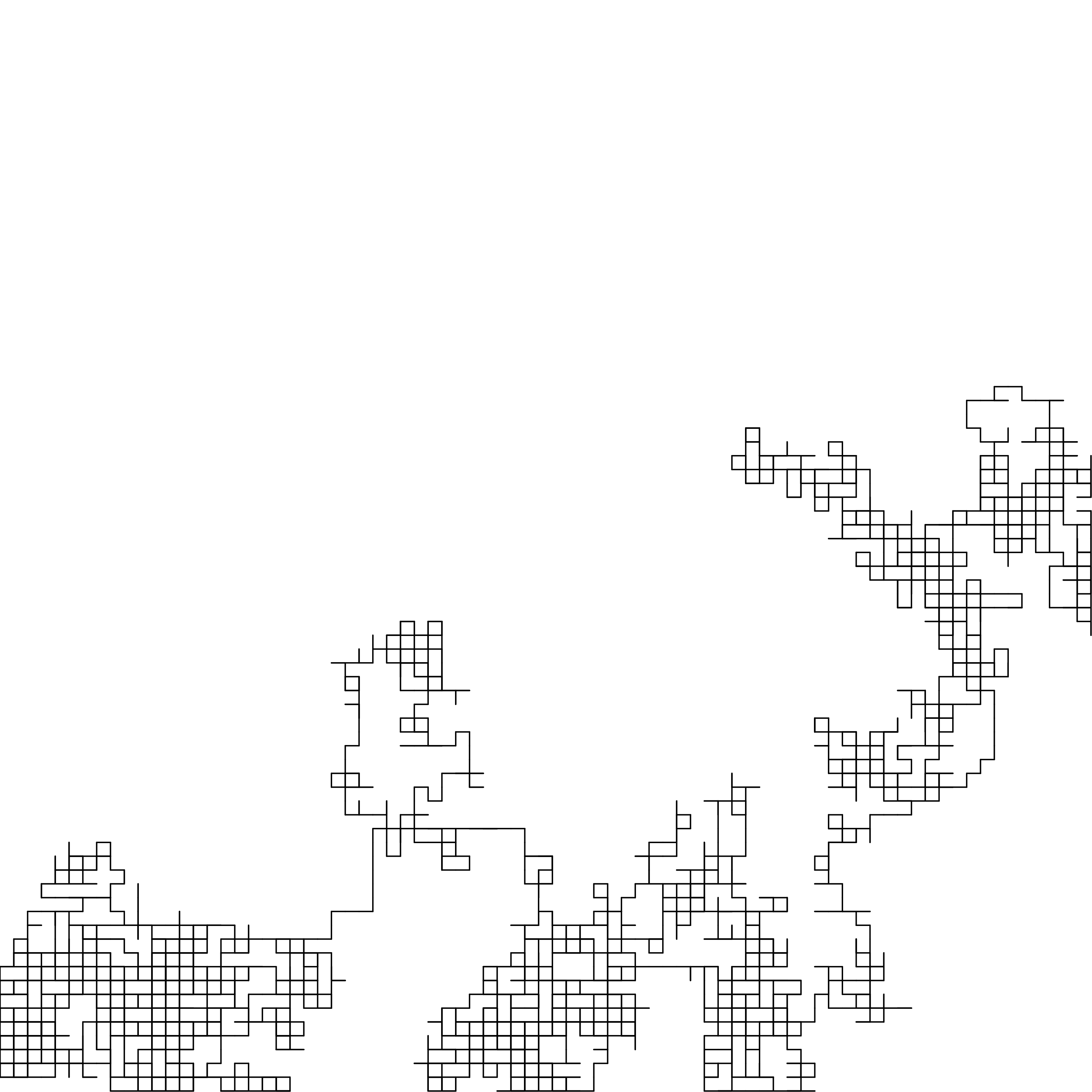
/* Random Walk Generator */
/* Made with Processing */
/* Andreas Pirchner, 2019 */
/*-------------------------------------------------*/
import processing.pdf.*;
PointCloud cloudy;
PVector cloudOrigin;
float spacing;
int pathLength = 500;
ArrayList<PVector> neighbours;
ArrayList<PVector> randomWalk;
void setup(){
size(1000,1000,P2D);
background(255);
cloudOrigin = new PVector(0,0,0);
spacing = width / 100;
cloudy = new PointCloud(80,80, cloudOrigin, spacing);
randomWalk = new ArrayList<PVector>();
randomWalk = cloudy.makeRandomWalk(300);
//neighbours = new ArrayList<PVector>();
//neighbours = cloudy.getAdjacentPoints(21);
fill(0);
ellipseMode(RADIUS);
stroke(0, 50);
for(int i = 0; i < randomWalk.size()-1; i++){
strokeWeight(1);
line(randomWalk.get(i).x, randomWalk.get(i).y, randomWalk.get(i+1).x, randomWalk.get(i+1).y);
}
stroke(0);
strokeWeight(1);
cloudy.drawCloud();
}
void draw(){
}
void mousePressed(){
background(255);
pathLength += 0;
cloudy = new PointCloud(80,80, cloudOrigin, spacing);
randomWalk = new ArrayList<PVector>();
randomWalk = cloudy.makeRandomWalk(pathLength);
//neighbours = new ArrayList<PVector>();
//neighbours = cloudy.getAdjacentPoints(21);
beginRecord(PDF, "filename-"+random(10000)+".pdf");
fill(0);
ellipseMode(RADIUS);
stroke(0);
for(int i = 0; i < randomWalk.size()-1; i++){
strokeWeight(1);
line(randomWalk.get(i).x, randomWalk.get(i).y, randomWalk.get(i+1).x, randomWalk.get(i+1).y);
}
stroke(0);
strokeWeight(1);
//cloudy.drawCloud();
endRecord();
}